申请号:CN201810599988.6
专利名称:一种基于视觉的移动机器人地形分类方法
发明人:康宇;吕文君;昌吉;李泽瑞;
专利类型:发明专利
摘要:
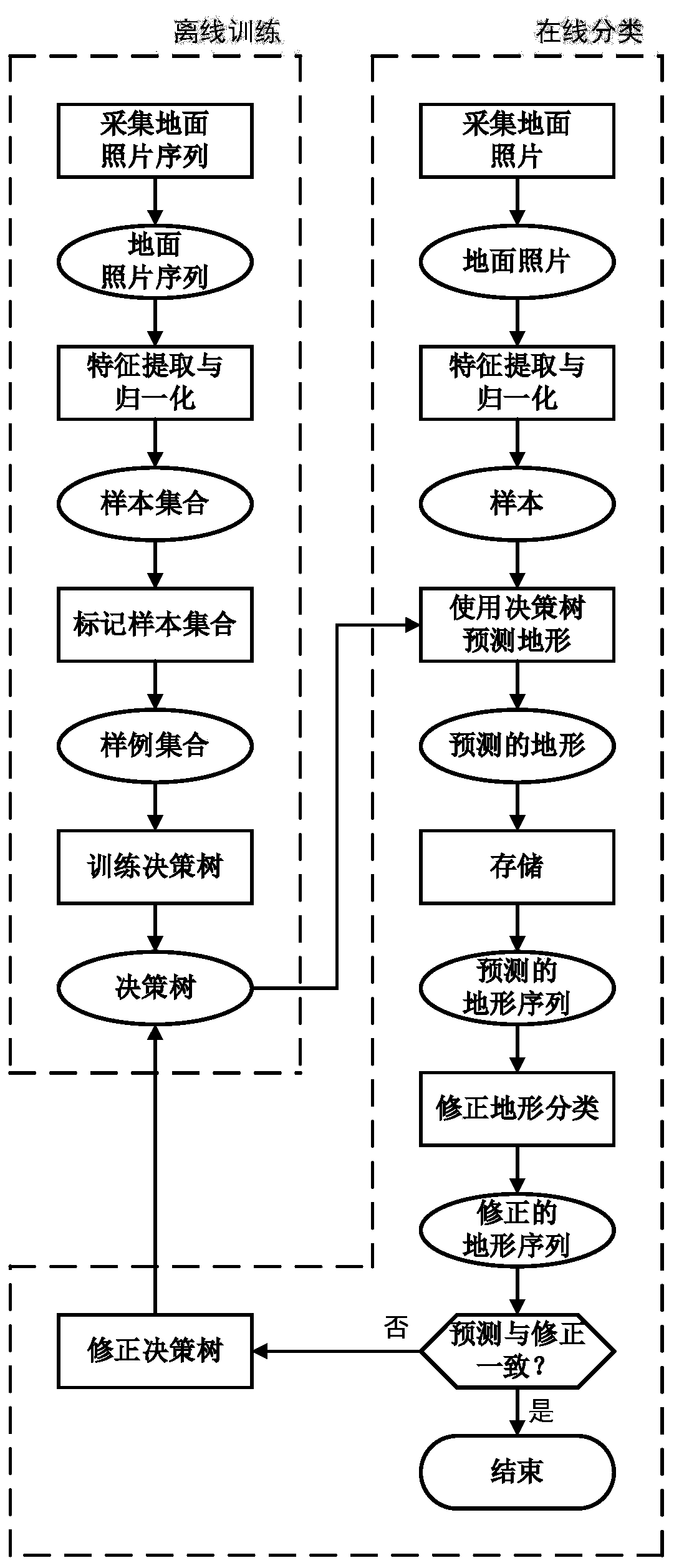
本发明公开了一种基于视觉的移动机器人地形分类方法,包括离线训练与在线分类两部分,其优点在于:1)采用了较为简单、紧凑的图像描述子与分类器,能够降低运算资源与电量的消耗,保证了系统的实时性,并且在分类器输出后端加入修正算法;解决了准确率降低的问题;2)在分类修正算法中提取被错误分类的样例,分类器利用该样例进行增量学习,提高了泛化性能,保证了长期运行的准确性。